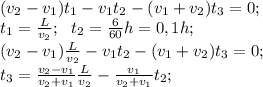
 , а автобуса
, а автобуса  ,
,  время движения автобуса во второй пункт, скорость в нашей системе
время движения автобуса во второй пункт, скорость в нашей системе  ,
,  час простоя автобуса(его скорость относительно велосипедиста
час простоя автобуса(его скорость относительно велосипедиста  , ну и
, ну и  момент с начала возвращения автобуса до встречи с велосипедистом,
момент с начала возвращения автобуса до встречи с велосипедистом, 
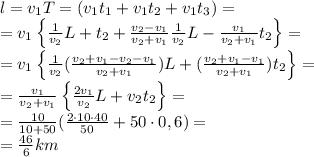
 расстояние между пунктами, а
расстояние между пунктами, а  растояние, которое проехал велосипедист
растояние, которое проехал велосипедист ,
,