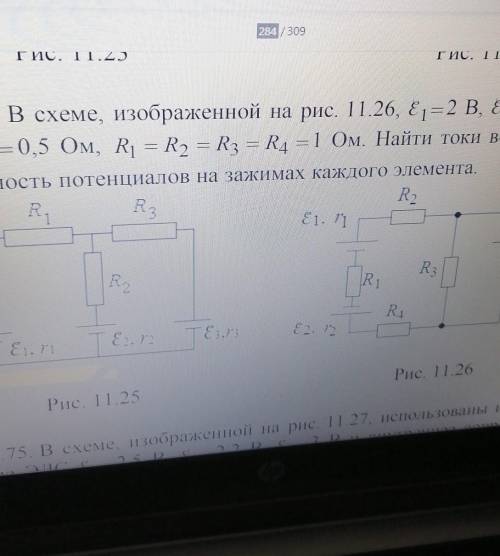
11.74. В схеме, изображенной на рис. 11. 26, E1=2 B, 8,2=3 B, E3=4 В, 1 = r2 = 3 = 0,5 Ом, R = R = R = R4=1 Ом. Найти Токи во всех участках цепи и разность потенциалов на зажимах каждого элемента. R, R3 1. 11 3. 3 R! R: R1 RA о ТЕ. Н. 8. 12 & А." 3 Яруу Рис. 11 26 Рис. 11 25
В таком случае необходимо интегрировать. Других методов тут нет.
Далее везде в квадратных скобках указываются единицы измерения. Поскольку в задаче присутствуют не только физические величины, уже содержащие в себе единицы измерения, и которые можно обозначать просто латинскими буквами. Но и численные значения из исходного уравнения, которые необходимо соответствующими единицами измерения сопровождать.
Работа, совершаемая такой пружиной вычисляется, как:
;
Знак минус перед интегралом берётся по той причине, что сила всегда противоположна деформации (растянули пружину – она стремится сжаться обратно, сжали пружину – она стремится к обратному распрямлению) Знак минус в нижнем пределе – не принципиален, поскольку энергия в данном случае вычисляется по чётным степеням.
Вся эта работа пойдёт на увеличение кинетической энергии, поскольку масса пружины не указана, а значит полагается пренебрежимо малой.
;
;
;
;
;
;
Посчитайте, должно получиться целое число, которым обычно называют ненужную ногу у собаки.
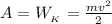
![A = - \int\limits^0_{-x_o_{_{.}}} { ( 5[\frac{H}{_M}]x + 10[\frac{H}{_{M^3}}]x^3 ) } \, dx =](/tpl/images/0473/8007/22ee3.png)
![= - 5[\frac{H}{_M}] \int\limits^0_{-x_o_{_{.}}} {x} \, dx - 10[\frac{H}{_{M^3}}] \int\limits^0_{-x_o_{_{.}}} { x^3 } \, dx = - 5[\frac{H}{_M}] \frac{x^2}{2} |_{-x_o_{_{.}}}^0 - 10[\frac{H}{_{M^3}}] \frac{x^4}{4} |_{-x_o_{_{.}}}^0 =](/tpl/images/0473/8007/d4e54.png)
![= 2.5[\frac{H}{_M}] x_o_{_{.}}^2 + 2.5[\frac{H}{_{M^3}}] x_o_{_{.}}^4 = 2.5[\frac{H}{_M}] x_o_{_{.}}^2 ( 1 + ( \frac{x_o_{_{.}}}{[_M]^{^{`}}} )^2 )](/tpl/images/0473/8007/6fe77.png) ;
; ;
;![2.5[\frac{H}{_M}] x_o_{_{.}}^2 ( 1 + ( \frac{x_o_{_{.}}}{[_M]^{^{`}}} )^2 ) = \frac{mv^2}{2}](/tpl/images/0473/8007/ede38.png) ;
;![v^2 = 5[\frac{H}{_M}] \frac{x_o_{_{.}}^2}{m} ( 1 + ( \frac{x_o_{_{.}}}{[_M]^{^{`}}} )^2 )](/tpl/images/0473/8007/41c2a.png) ;
;![v^2 = 5[\frac{ _{ K\Gamma M } / c^2 }{_M}] \frac{x_o_{_{.}}^2}{m} ( 1 + ( \frac{x_o_{_{.}}}{[_M]^{^{`}}} )^2 )](/tpl/images/0473/8007/532f7.png) ;
;![v^2 = \frac{ 5 [ _{ K\Gamma } ]_{_{_{.}}} }{m} ( \frac{x_o_{_{.}}}{[c]^{^{`}}} )^2 ( 1 + ( \frac{x_o_{_{.}}}{[_M]^{^{`}}} )^2 )](/tpl/images/0473/8007/e4da8.png) ;
;![v = \frac{x_o_{_{.}}}{[c]^{^{`}}} \sqrt{ \frac{5 [ _{K\Gamma} ]_{_{_{.}}} }{m} ( 1 + ( \frac{x_o_{_{.}}}{[_M]^{^{`}}} )^2 ) }](/tpl/images/0473/8007/752c7.png) ;
;