5.1) Действие активного гидролокатора основано на определении местоположения подводного объекта по световым сигналам, излучаемым самим объектом.
2) Гидролокатор определяет расстояние до объекта в толще воды основываясь на разнице между временем запуска сигнала и временем получения отраженного сигнала.
3) Гидролокатор определяет расстояние до объекта в толще воды, основываясь только на скорости рас звука в воде.
4) Применение эхолота шире, чем у гидролокатора.
5) Активный гидролокатор состоит из приемника и передатчика.
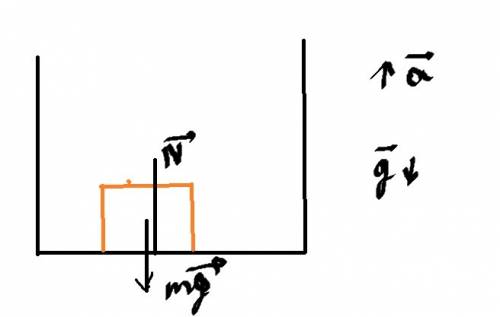
Объяснение:
 - модулю (P-это вес, N-сила нормальной реакции опоры)
- модулю (P-это вес, N-сила нормальной реакции опоры)

 - соответственно вес будет уменьшаться, т.к уменьшается давление на опору со стороны ящика.
- соответственно вес будет уменьшаться, т.к уменьшается давление на опору со стороны ящика.